
Creo-典型机构仿真3D接触5.4图文教程发布时间:2022年08月01日 08:01
虎课网为您提供综合教程版块下的Creo-典型机构仿真3D接触5.4图文教程,本篇教程使用软件为Creo 4.0,难度等级为初级练习,下面开始学习这节课的内容吧!
大家好!欢迎来到Creo4.0运动仿真与分析视频教程。
本节课讲解的是3D接触。对于本节课的内容,同学们可以在评论区留言评论,老师会给大家进行解答。

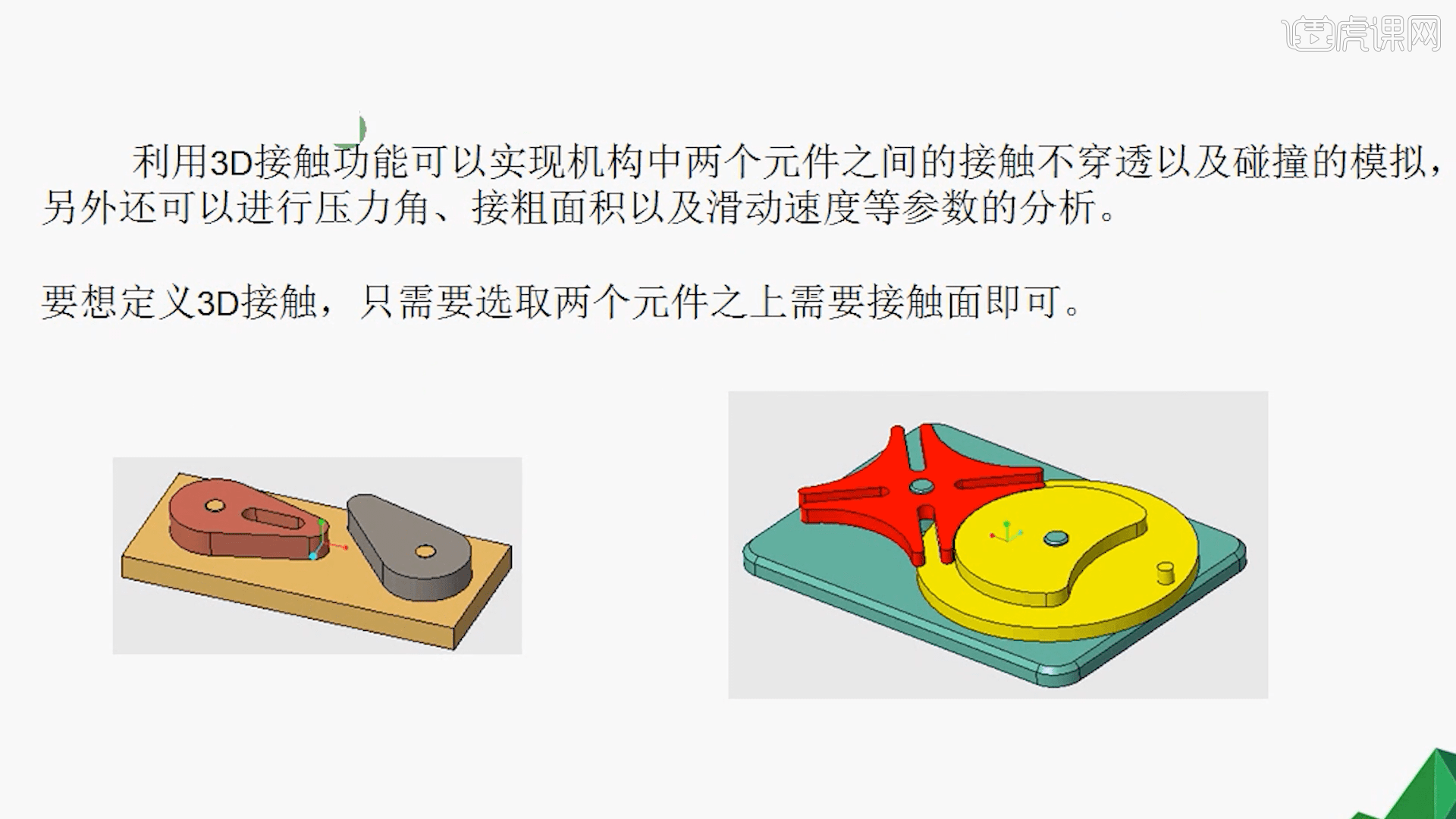
1.3D接触的基本概念(利用3D接触功能可以实现机构中两个元件之间的接触不穿透以及碰撞的模拟,
另外还可以进行压力角、接触面积以及滑动速度等参数的分析只需选取两个元件之上需要接触面即可)
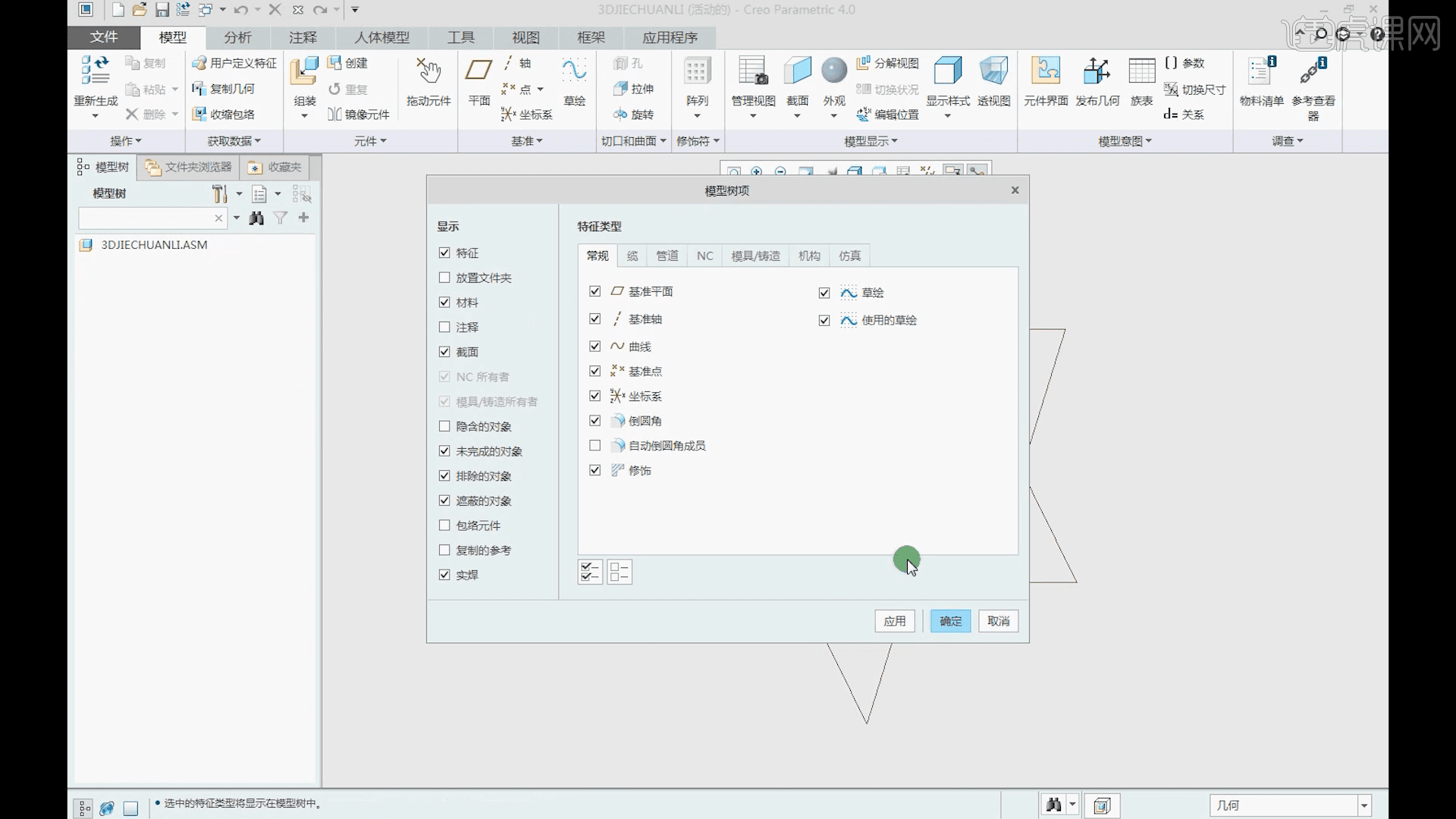
2.回到软件当中,先拭除未显示的,然后将工作目录设置到ch05.04中的01文件夹里;然后新建一个装
配的文件,类型为装配,子类型为设计,名称为:3Djiechu,取消使用默认模板;选择mmns_asm_design
装配模板,此时进入装配环境当中。将平面进行显示,也将模型树中的特征打开。

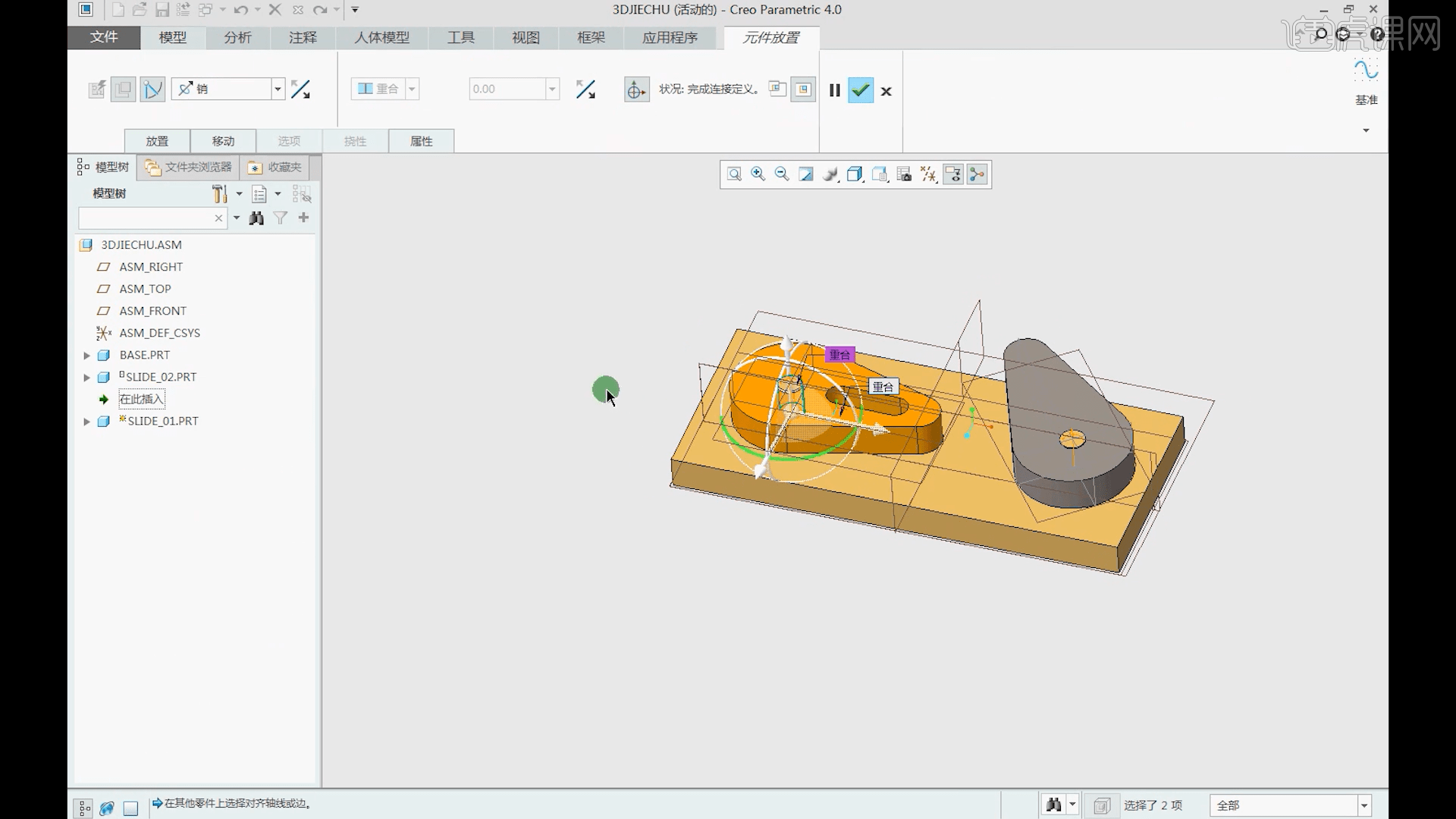
3.单击组装,找到base.prt单击打开。直接选择默认的装配约束即可。选择组装,找到slide_02.prt单击打开
只需要添加销钉,找到同轴的参考,再选择平移的参考的两个面。单击确定。CtrlAlt+左键,可以转动看看。
单击组装,找到slide_01.prt;依然添加的是销钉连接,找到轴对齐的参考,再找到平移的参考。也可以具体的
进行定义初始位置。
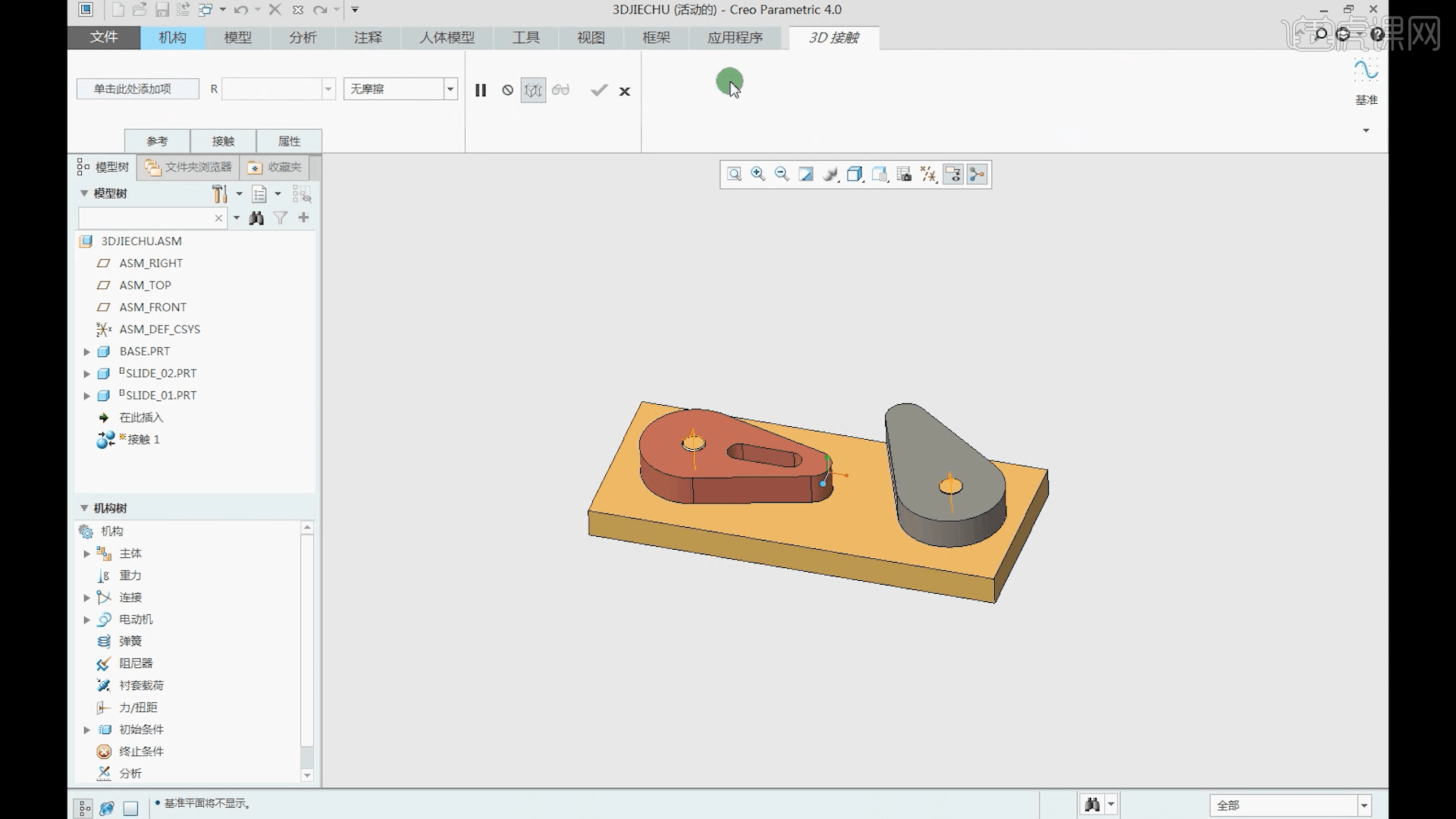
4.将面隐藏起来,拖动元件,再加一个快照,把它快照定义下来。然后单击应用程序,选择机构,进入机构仿真
的环境当中。然后选择初始条件,选择这个快照Snapshot1。单击机构,在连接区域当中选择3D接触命令,选择
之后,会出现一个3D接触的功能选项卡出来。单击参考,在这里面选择两个参考的对象。接触与属性为默认的。
完成3D接触的一个添加。
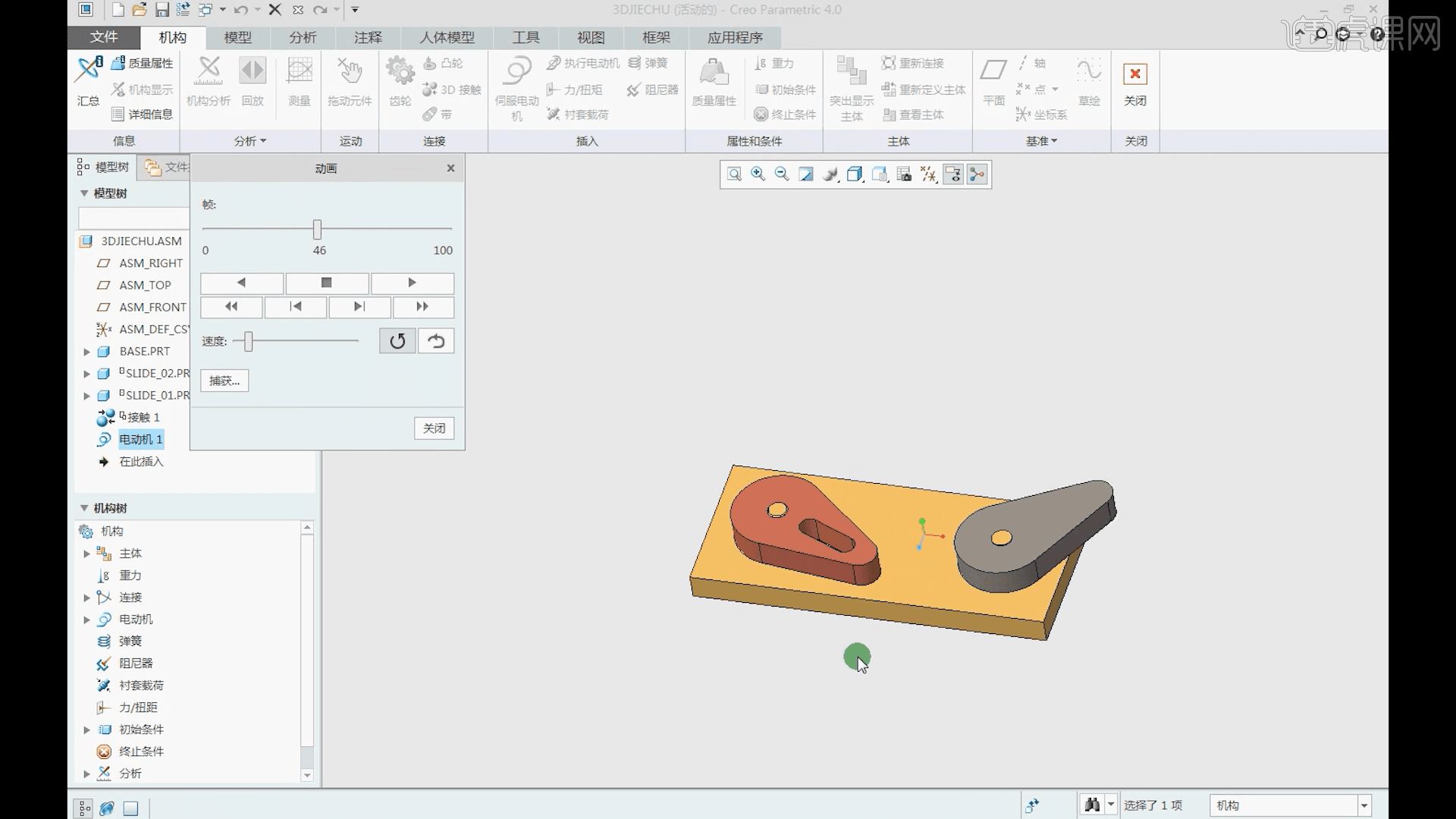
5.选择插入一个伺服电动机,插入,选择控制的是速度,函数类型为常量,系数为60deg/sec。选择机构分析,将
名称选择为默认的,位置类型,初始配置为快照,其他为默认,结束时间为20秒。单击运行,观看效果。然后设置
一下结束时间为10秒,然后单击确定。单击回放,先保存这个结果。然后单击这个播放当前结果的按钮。单击捕获,
保存下来。然后关闭,重建一下。
6.回到软件当中,先拭除未显示的,然后将工作目录设置到ch05.04中的02文件夹里面去。然后新建一个装配文件,
选择装配,子类型为设计,名称为3Djiechuanli,取消使用默认模板,选择mmns_asm_design模板。将面显示,将
模型树的特征打开。
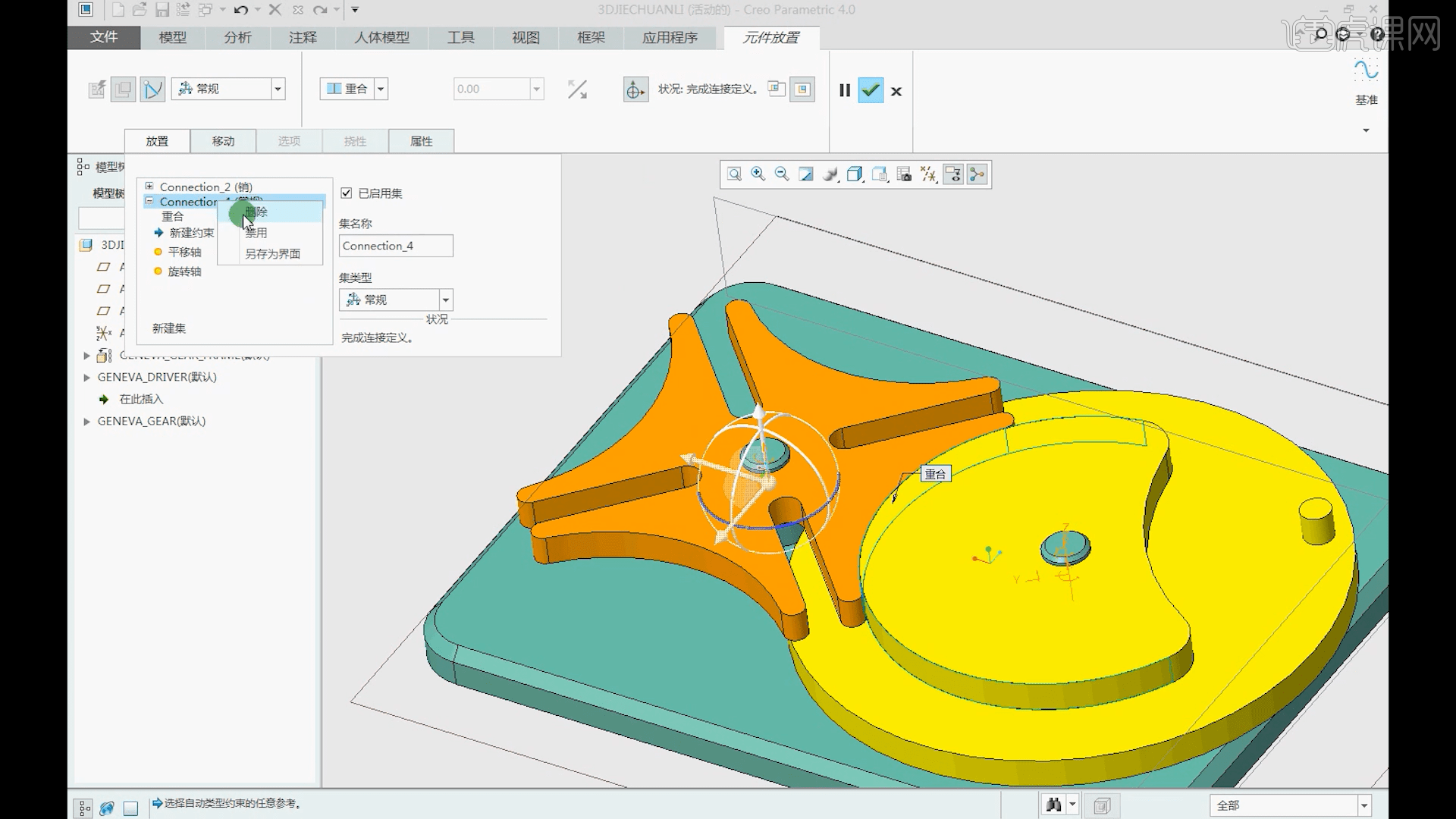
7.单击组装,找到geneva_gear_frame.prt打开,选择默认即可。外观调整一下。再单击组装,找到geneva_driver.prt
打开,角度调整一下。添加一个销钉的连接,找到轴对齐、平移的参考。依然是点击组装,找到geneva_gear.prt打开。
选择销钉连接,找出轴对齐、平移的参考。GENEVA_GEAR里面给它加一个约束,添加一个常规,添加后,删除掉一个
Connection_4(常规)。单击确定,后期调整颜色。拖动元件,选择快照。
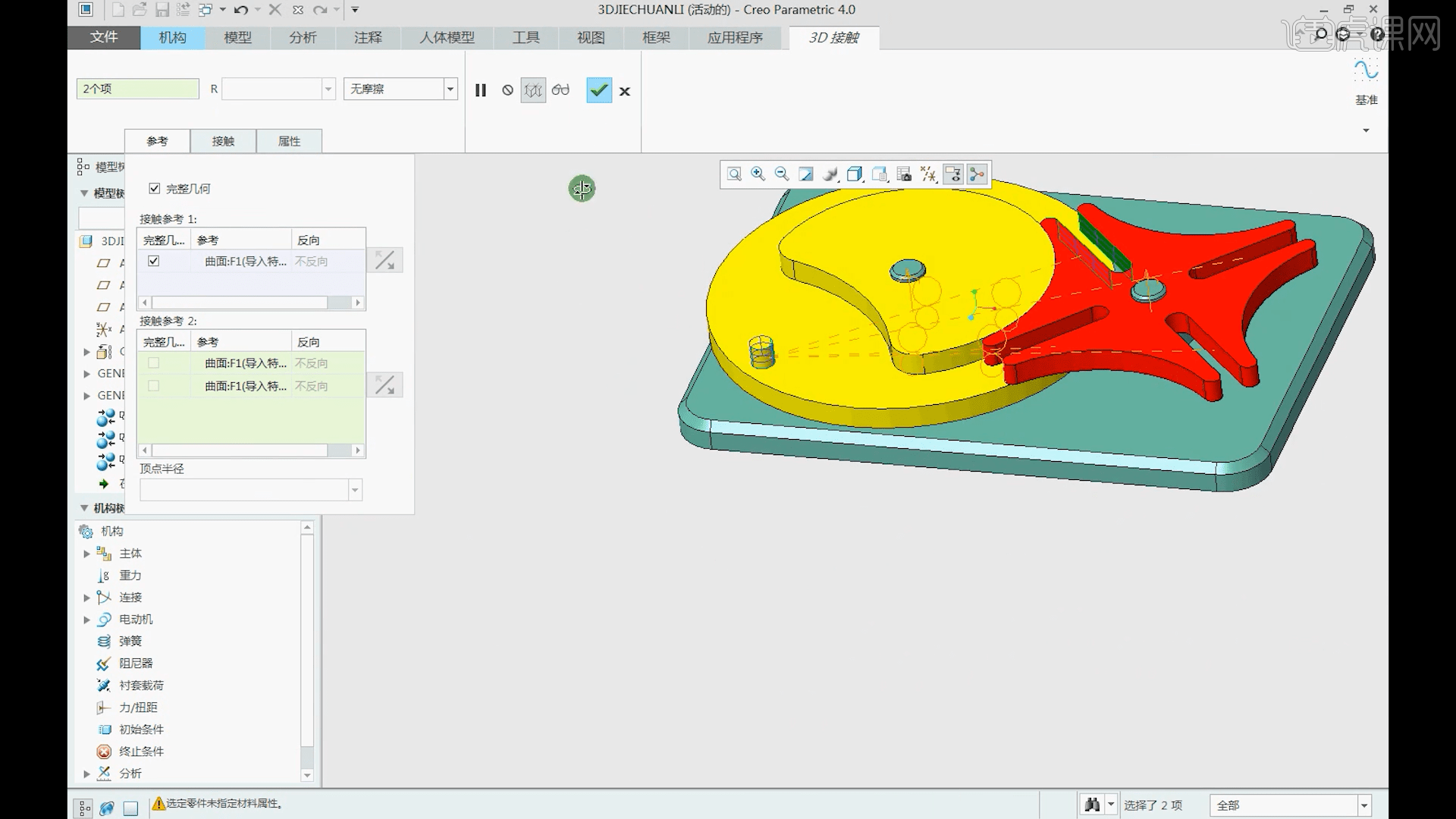
8.将面隐藏一下。点击应用程序,单击机构,在连接区域找到3D接触按钮,此时会出现3D接触的一个选项卡出来,单击
选项卡的一个参考节点。然后进行选择第一个参考,然后会自动跳转到选择第二个参考,这时候按住Ctrl建选取第二个元
件当中的3D接触的参考(两个面),同样的添加第二个与第三个第四个3D接触。
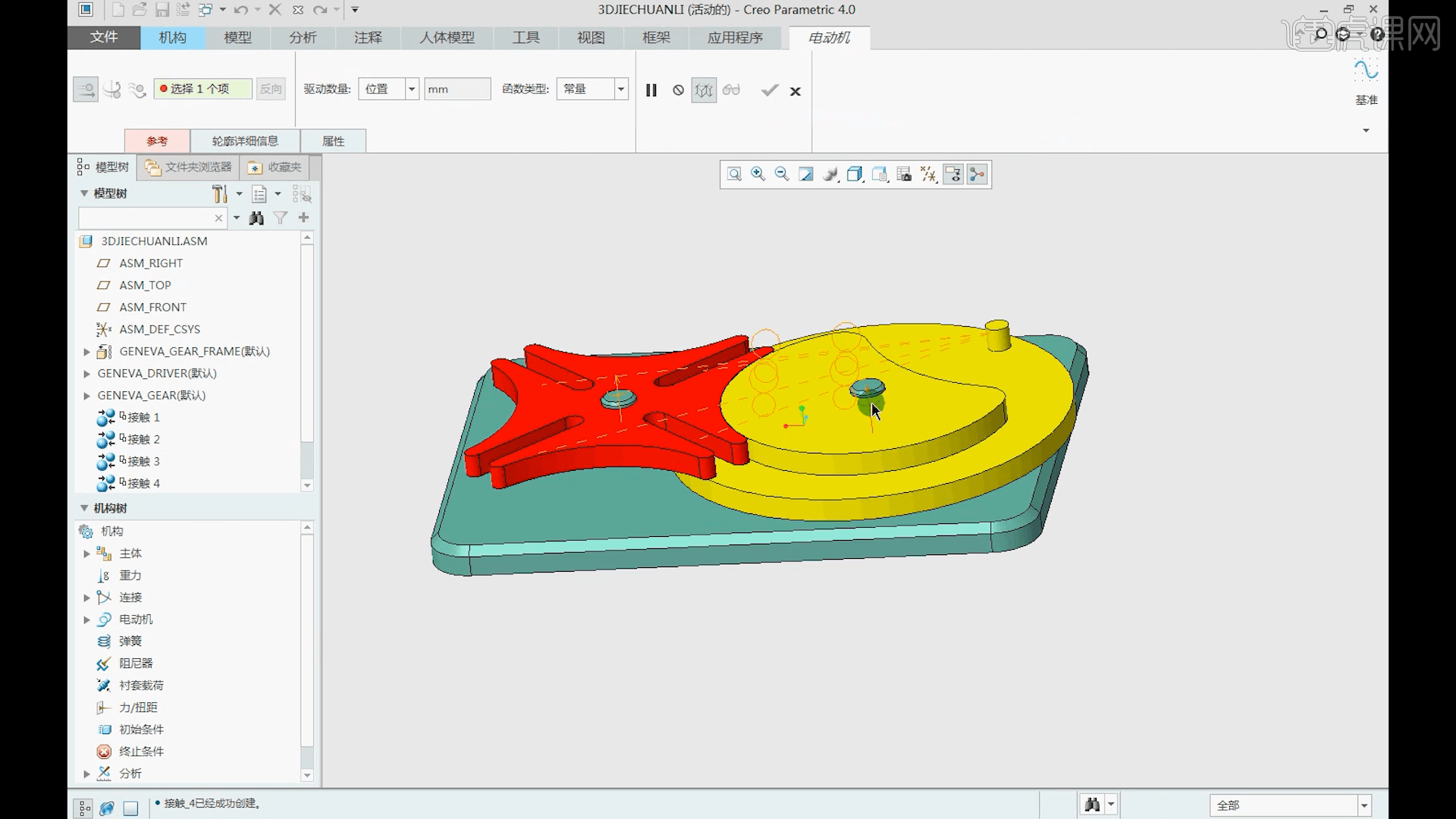
9.添加一个伺服电动机,在轮廓详细信息处控制的是速度,将值定义是常量的,系数为60deg/sec。选择机构分析,名称
为默认,位置的类型,结束时间为10,初始配置为当前,然后运行看一下。结束时间为12秒,初始配置为快照的,再运行
看看。然后单击确定,单击回放,先保存。再单击播放当前结果。然后将它保存一下。
以上就是Creo-典型机构仿真3D接触5.4图文教程的全部内容了,你也可以点击下方的视频教程链接查看本节课的视频教程内容,虎课网每天可以免费学一课,千万不要错过哦!






站内热门


- 扫码下载APP

- 官方微信

