
行星轮系-轮系图文教程发布时间:2021年11月08日 08:00
虎课网为您提供综合教程版块下的行星轮系-轮系图文教程,难度等级为初级练习,下面开始学习这节课的内容吧!
本课教程的目的是掌握机械设计原理,了解行星轮系,教你如何写齿轮啮合顺序线以及求传动比,喜欢的一起来学习吧。

学完本课内容后,同学们可以根据下图作业布置,在视频下方提交作业,老师会一一解答。

那我们开始今天的教程吧。
1.图7.7所示为行星轮系,齿轮2(共3个)的轴线可转动,是行星轮,齿轮1、3与行星轮啮合,轴线固定,称为太阳轮,构件H支持行星轮并与太阳轮共轴线,称为行星架。行星轮系由行星轮、太阳轮、行星架和机架组成。
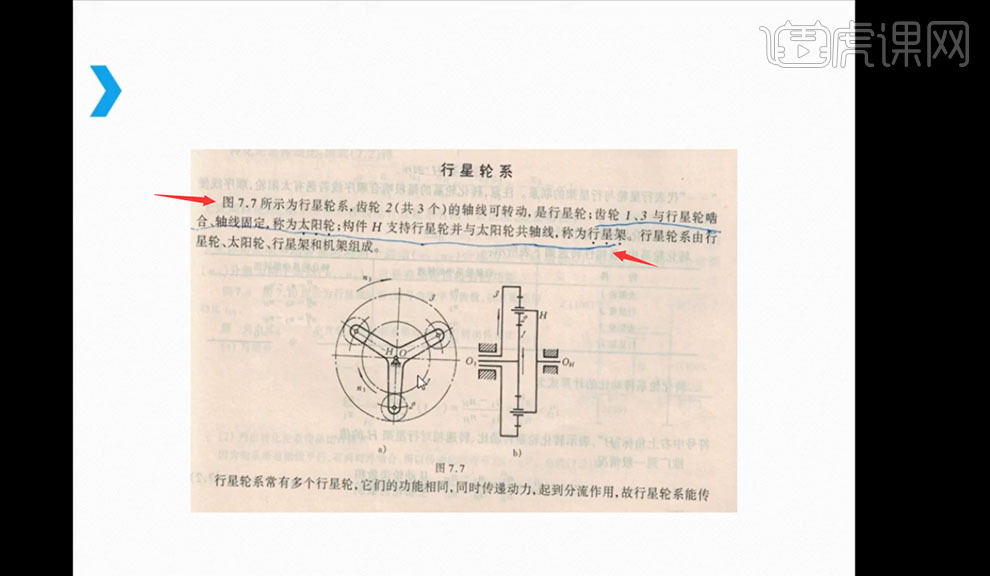
2.行星轮系常有多个行星轮,它们的功能相同,同时传递动力,起到分流作用,故行星轮系能传递更大的功率,又因为这些行星轮对称于中心轴,运动时可自相平衡。

3.由于行星轮系中的行星轮轴线不固定,所以不能直楼引用定轴轮系的方法计算传动比。

4.采用反转法,对整个行星轮系,加上一个绕行星架轴线OH、与行星架转速等值反向的转速(一nH),这时行星架处于相对静止状态,从面获得一假想的定轴轮系,称为转化轮系。
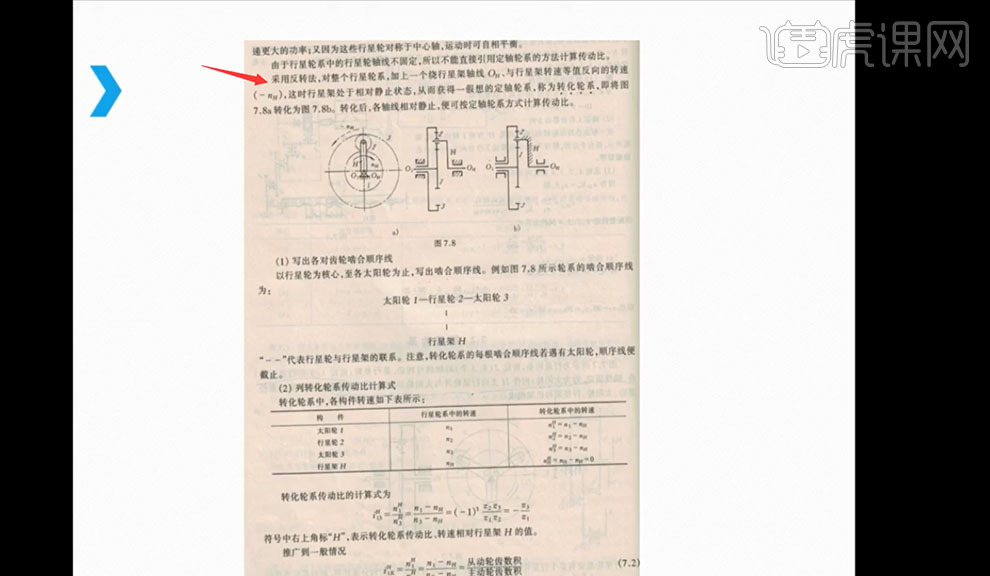
5.计算传动比的步骤,(1)写出各对齿轮啮合顺序线,以行星轮为核心,至各太阳轮为止,写出啮合顺序线。“--”代表行星轮与行星架的联系。

6.(2)列转化轮系传动比计算式,转化轮系传动比的计算式具体如图所示。

7.(3)标出转化轮系转向,确定传动比符号,若首、末两轮转向相同用正号,相反用负号。

8.图7.8所示行星轮系三个可动构件1、2、H中,必须知道两个构件的运动,才能求出第三个构件运动,所以此轮系具有两个自由度,称为差动轮系。

9.图7.9所示的锥齿轮行星轮系中,z1=z2,其啮合顺序线具体如图所示,转化轮系传动比符号:首轮Ⅰ与末轮3轴线平行,逐对标出齿轮转向,由图可知,首、末两轮转向相反,采用负号。

10.转化轮系传动比的具体式子如图所示,上式说明锥齿轮行星轮系有两个自由度,是差动轮系,上式可写为2nH=n1+n3。

11.上式还可以说明差动轮系可将两个运动合成为一个运动,相反也可将一个运动分解为两个运动,这是差动轮系特有的功能。

12.例7.4求轮系传动比,首先写啮合顺序线,再列出转化轮系传动比计算式,最后通过套用前面推导出的公式求得传动比。
 13.轮系的可动构件I 、H中,只需知道一个构件运动,便可求出另一可动构件运动,也就是说,只需输入一个运动量,其余构件运动便可确定,所以该轮系具有一个自由度,这种轮系称为普通行星轮系。
13.轮系的可动构件I 、H中,只需知道一个构件运动,便可求出另一可动构件运动,也就是说,只需输入一个运动量,其余构件运动便可确定,所以该轮系具有一个自由度,这种轮系称为普通行星轮系。

14.因为写啮合顺序线时,遇有太阳轮便截止,所以每根啮合顺序线至多两端各联一个太阳轮,即共联两个大阳轮。

15.只有一根啮合顺序线的行星轮系,称为简单行星轮系,有多根啮合顺序线的行星轮系,称为复合行星轮系。

16.本节课就到这里啦。

以上就是行星轮系-轮系图文教程的全部内容了,你也可以点击下方的视频教程链接查看本节课的视频教程内容,虎课网每天可以免费学一课,千万不要错过哦!






站内热门


- 扫码下载APP

- 官方微信

