
SW-蜘蛛机械手案例装配图文教程发布时间:2021年11月01日 08:00
虎课网为您提供综合教程版块下的SW-蜘蛛机械手案例装配图文教程,本篇教程使用软件为SW (2016),难度等级为初级练习,下面开始学习这节课的内容吧!
本课教程的目的是学会使用装配约束来完成装配体设计,掌握插入子装配体的方法与正确圆周阵列零部件的旋转轴等,喜欢的一起来学习吧。
学完本课内容后,同学们可以根据下图作业布置,在视频下方提交作业图片,老师会一一解答。
那我们开始今天的教程吧。
1.根据参考图分析零件号与零件数量,打开【SOLIDWORKS】软件,点击【文件】新建【装配体】,点击【浏览】,选择【安装背板】,依次导入【零部件】,具体如图示。
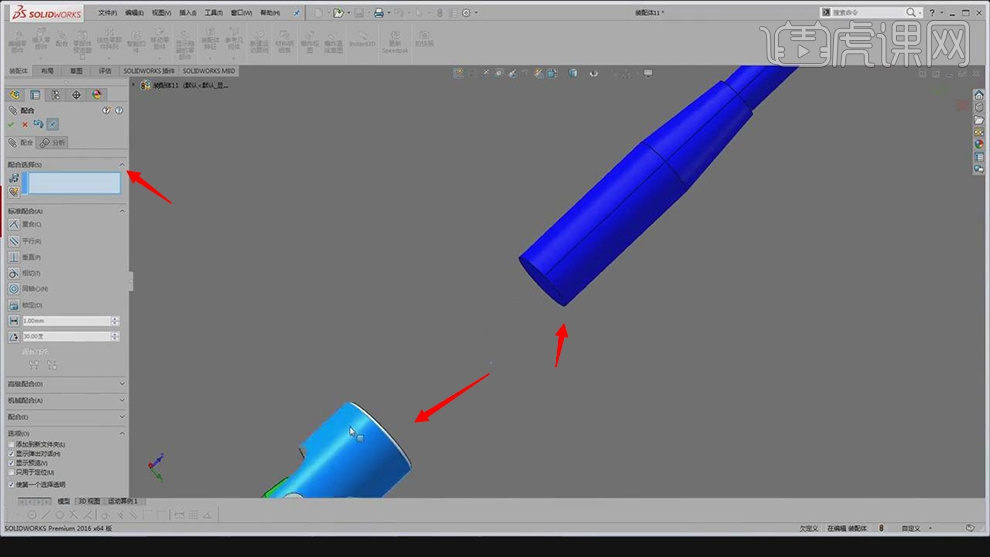
2.选择【装配体】面,点击【配合】,选择另一个【装配体】的面,具体如图示。
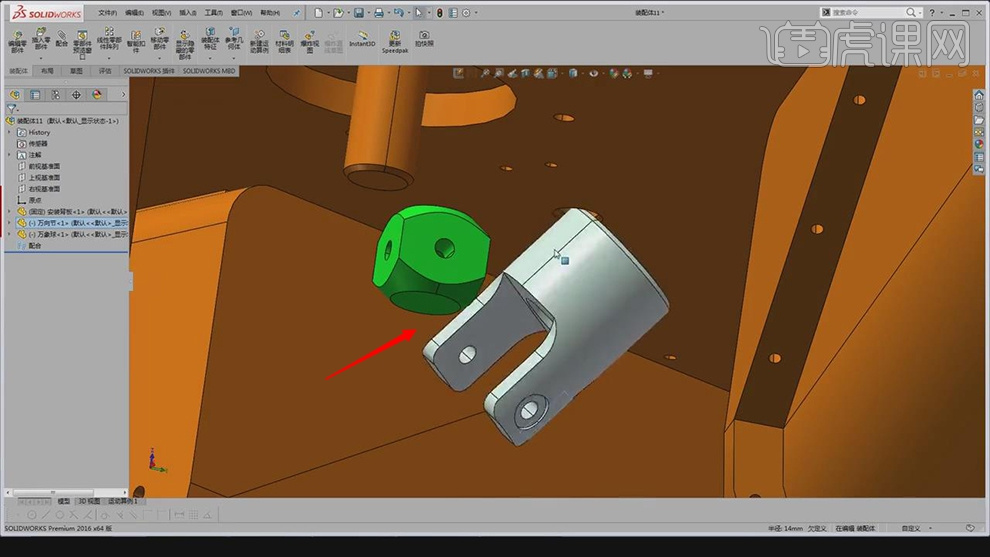
3.选择【零部件】面,点击【配合】,选择【另一个零部件】面,点击【重合】,具体如图示。
4.选择【零部件】,按【Ctrl+移动复制】零部件,调整【位置】。选择【零部件】,选择【面】,点击【配合】重合,具体如图示。
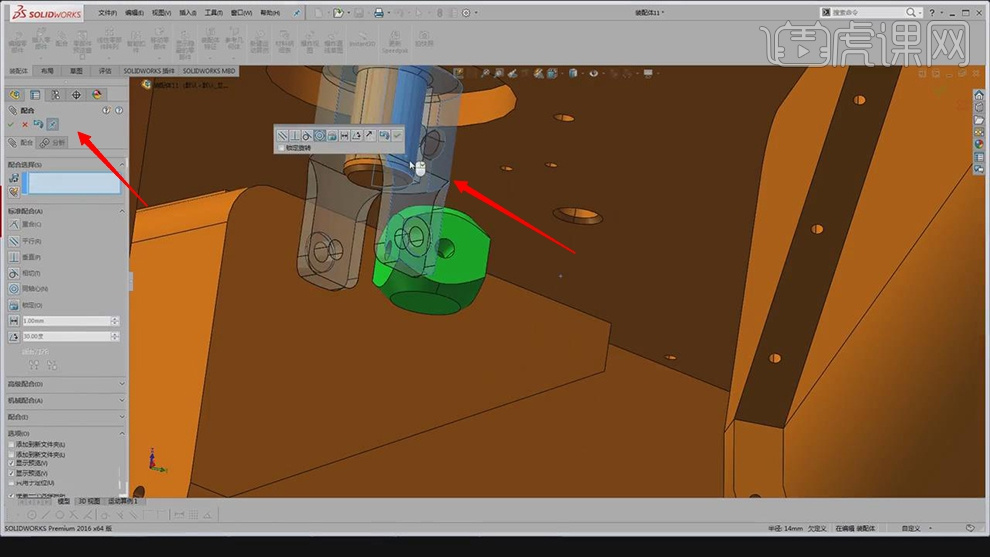
5.点击【插入零部件】,点击【浏览】,选择【传送轴】,调整【位置】。选择【传送轴】面,点击【配合】,选择【圆周面】,点击【重合】,具体如图示。
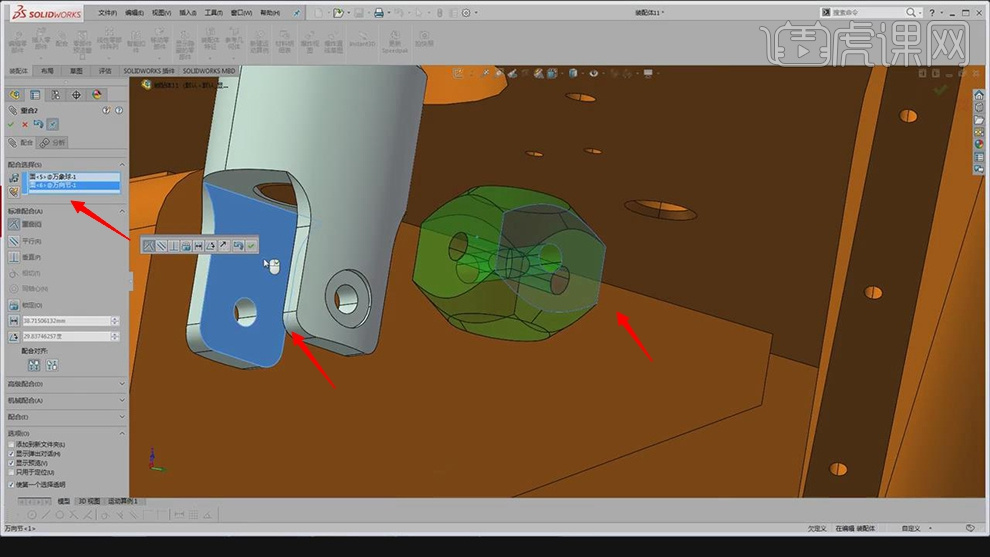
6.选择【边线】,点击【配合】平行,再次点击【平行】,具体如图示。
7.选择【零部件】,调整【位置】。选择【面】,点击【配合】,再次选择【面】,具体如图示。
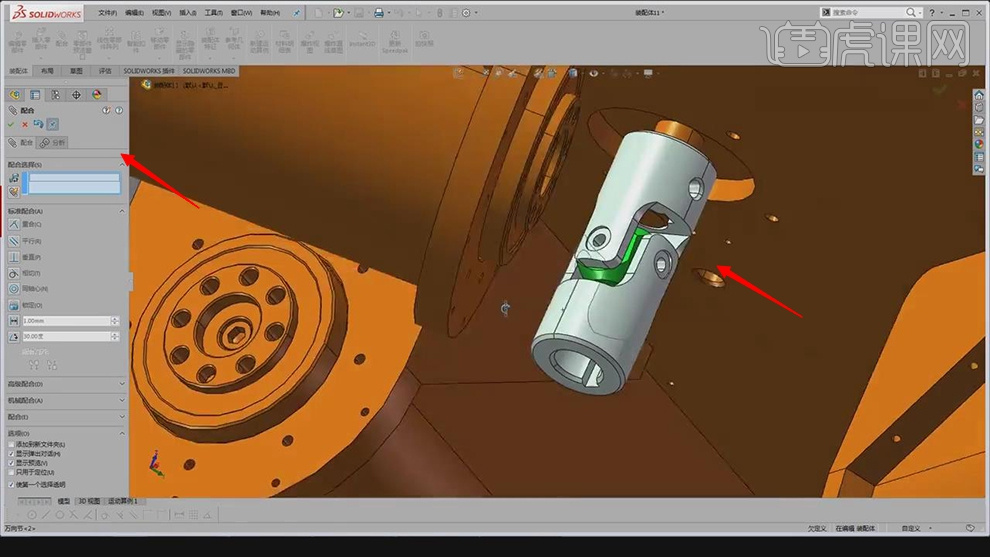
8.点击【浏览】,选择【零部件】。选择【面】,点击【配合】,点击【同轴心】,选择【圆中面】,点击【确定】,具体如图示。

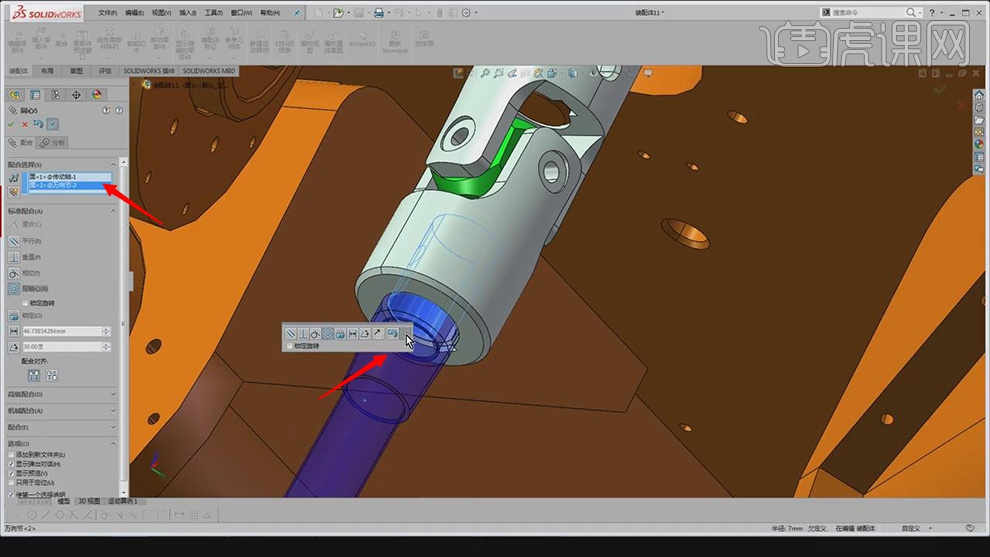
9.按【Ctr+移动复制】零部件,调整【旋转】。选择【面】,点击【配合】,点击【同心】。选择【边线】,点击【平行】,点击【确定】,具体如图示。

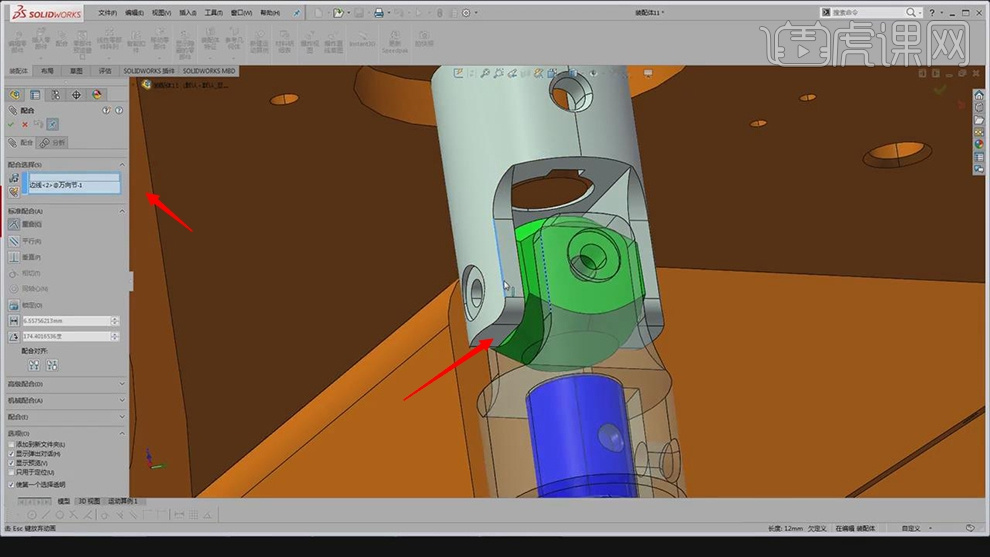
10.点击【浏览】,选择【安装架】,选择【底面】,点击【配合】,选择【面】,点击【同心】。选择两个【面】,点击【配合】距离,输入【距离】3,点击【确定】,具体如图示。

11.再次点击【插入零部件】,点击【浏览】,选择【联机干组件】,选择【圆中面】,点击【配合】重合,点击【确定】,具体如图示。

12.选择【面】,点击【配合】,选择【面】,点击【相切】,具体如图示。
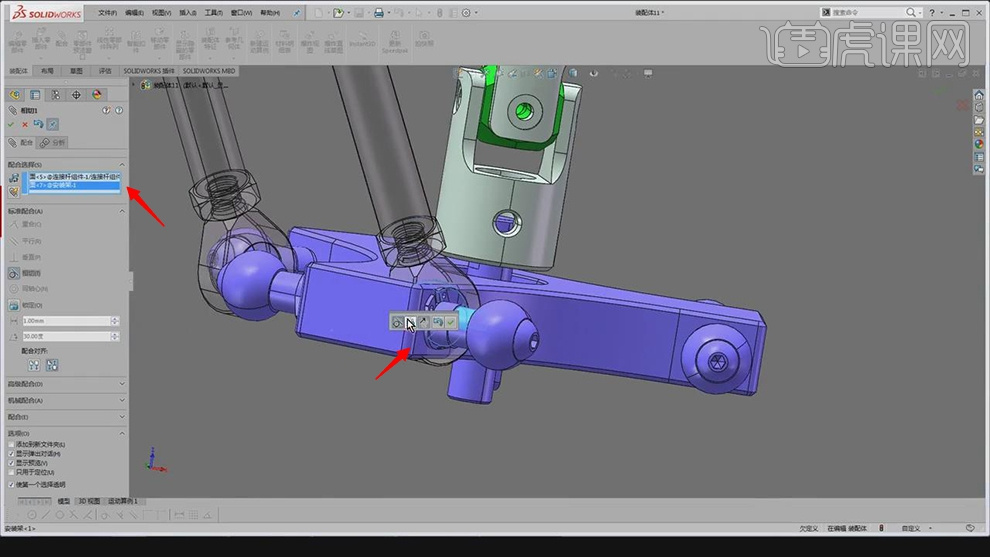
13.选择【圆中面】,点击【配合】,选择【圆中面】,点击【确定】,具体如图示。

14.选择【圆中面】,点击【配合】平行,点击【面】,点击【确定】,具体如图示。

15.选择【面】,点击【配合】距离,再次选择【面】,调整【距离】1mm,具体如图所示。

16.点击【线性零部件阵列】圆周零部件阵列,选择【面】,再次选择【零部件】,【右键】确定,具体如图所示。

17.点击【浏览】,选择【零部件】,选择【地面】,点击【圆】,画出圆,点击【智能尺寸】,标注【10】,具体如图所示。

18.点击【拉伸凸台/基体】,点击【圆】,调整【从】草图基准面,调整【5mm】,具体如图所示。

19.选择【圆】,点击【面】,选择【配合】重合,具体如图所示。

20.点击【浏览】,选择【零部件】,选择【面】,点击【配合】重合,点击【确定】,具体如图示。

21.点击【线性零部件阵列】镜向零部件,选择【基准面】,选择【零部件】,点击【确定】,具体如图示。

22.本课作业内容具体如图所示。

23.最终效果具体如图所示,同学们不要忘记提交作业哦。

以上就是SW-蜘蛛机械手案例装配图文教程的全部内容了,你也可以点击下方的视频教程链接查看本节课的视频教程内容,虎课网每天可以免费学一课,千万不要错过哦!






站内热门


- 扫码下载APP

- 官方微信

