虎课网-专注职业教育
拖动LOGO到书签栏,立即收藏虎课网

UG-电动滑板设计模型图文教程发布时间:2021年11月01日 08:00
虎课网为您提供综合教程版块下的UG-电动滑板设计模型图文教程,本篇教程使用软件为UG (11.0),难度等级为初级练习,下面开始学习这节课的内容吧!
1.本课主要内容具体如图所示。
2.本课课后作业具体如图所示。
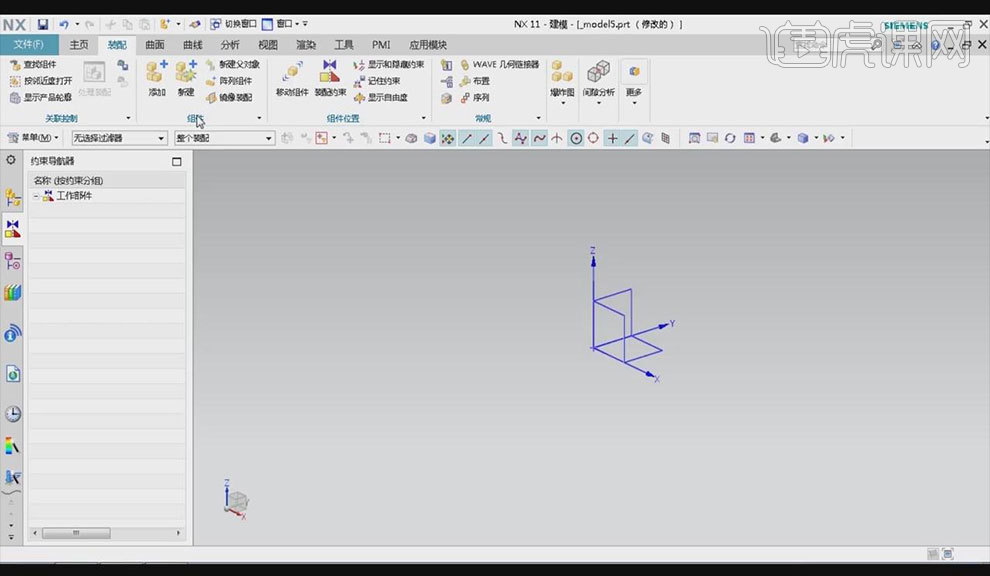
3.对效果图进行分析,打开UG,新建空白文档,选择【装配】选项卡。【装配导航器】的作用是描述部件名称,【约束导航器】记录着零部件与零部件之间的位置约束。
4.单击【添加】选择部件,将【定位】设置为【绝对原点】,单击【确定】。单击【添加】选择部件,将【定位】设置为【根据约束】,单击【确定】。选择物体,点击【装配约束】,在【约束类型】中点击【中心】,单击【确定】。
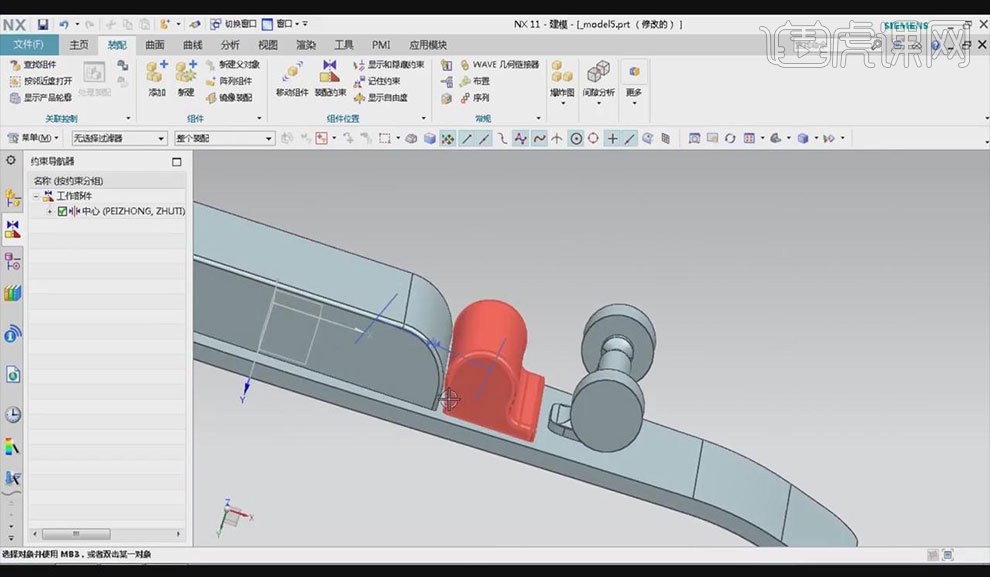
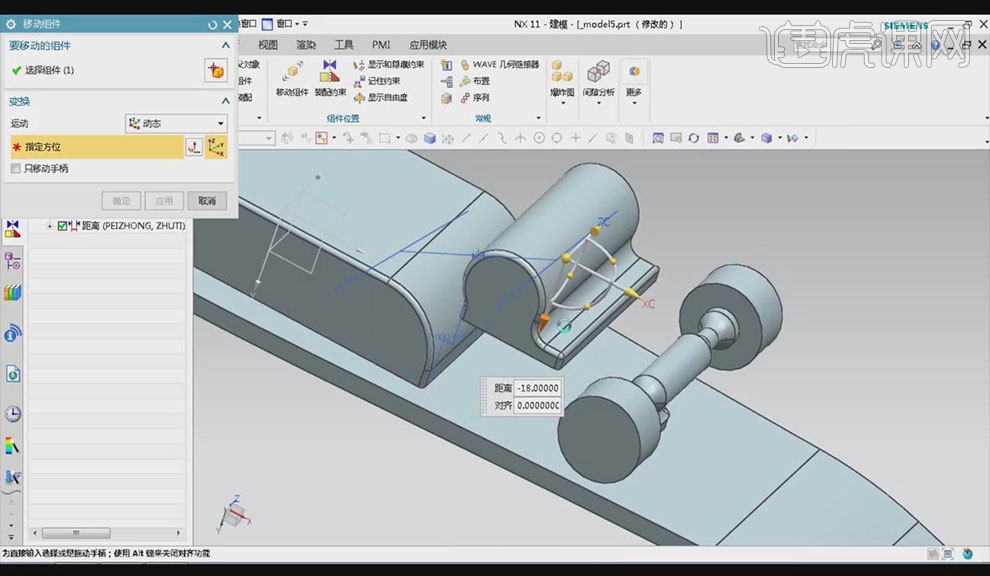
5.选择物体,点击【装配约束】,设置【距离】为2,单击【确定】。按【Ctrl+T】打开移动对象,对其进行移动。
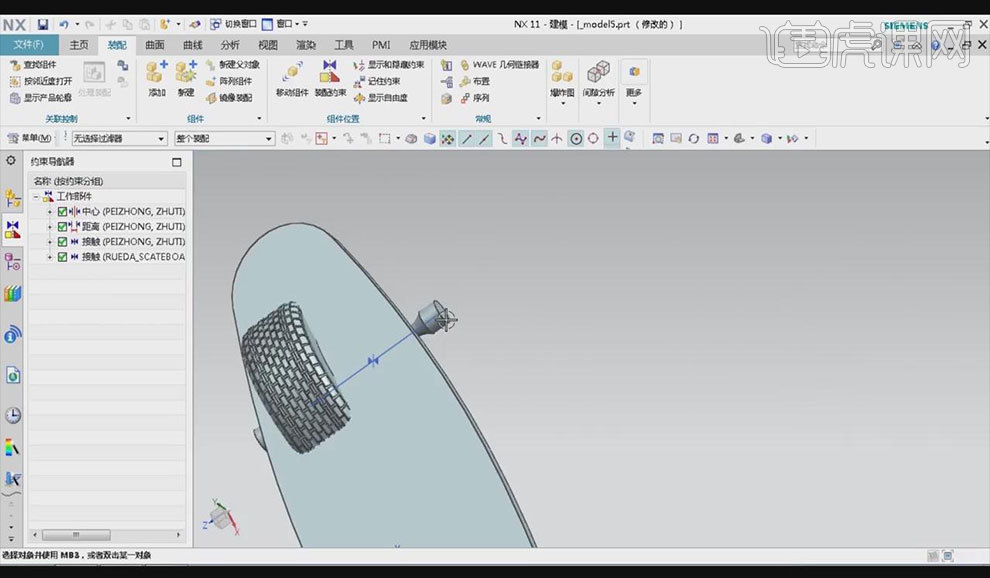
6.选择物体,点击【装配约束】,设置【方位】为【接触】,将其调整至效果图所示。单击【添加】选择部件,将【定位】设置为【根据约束】,单击【确定】。点击【装配约束】,设置【方位】为【自动判断中心/轴】。
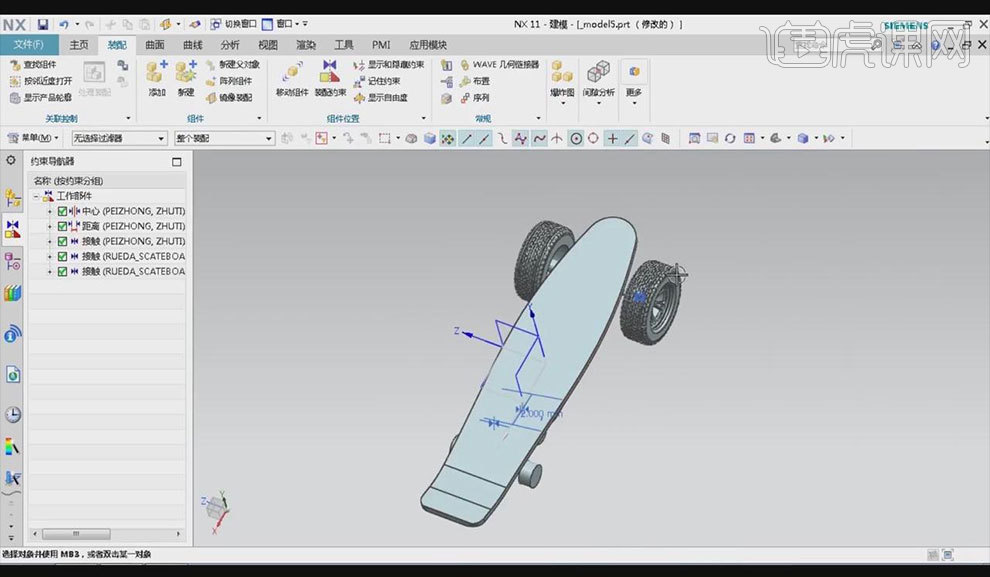
7.点击【装配约束】,设置【方位】为【接触】,将其调整至效果图所示。点击【镜像装配】,调整至效果图所示。
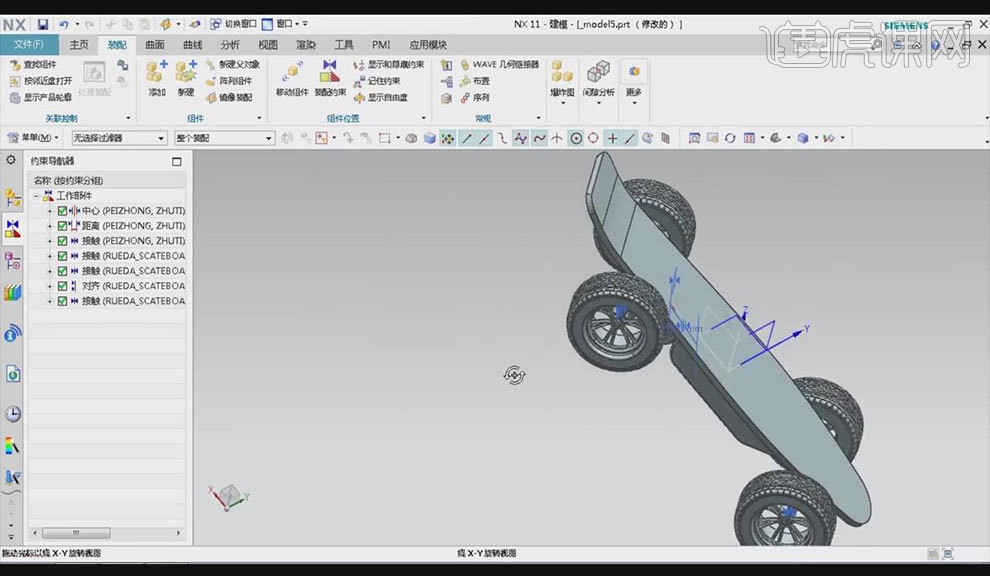
8.用同样的方法添加轱辘部件,如图所示。
9.本课课后作业具体如图所示。
10.本课主要内容具体如图所示。

以上就是UG-电动滑板设计模型图文教程的全部内容了,你也可以点击下方的视频教程链接查看本节课的视频教程内容,虎课网每天可以免费学一课,千万不要错过哦!
点击观看视频教程
UG-电动滑板设计模型
立即学习初级练习3856人已学视频时长:10:42
特别声明:以上文章内容仅代表作者huke88本人观点,不代表虎课网观点或立场。如有关于作品内容、版权或其它问题请与虎课网联系。
500+精品图书
20G学习素材
10000+实用笔刷
持续更新设计模板





站内热门


- 扫码下载APP

- 官方微信

为了防范电信网络诈骗,如网民接到962110电话,请立即接听客服热线:400-862-9191
