
UG圆盘外径检具装配如何使用发布时间:暂无
1.本课主要内容具体如图所示。
2.本课课后作业具体如图所示。
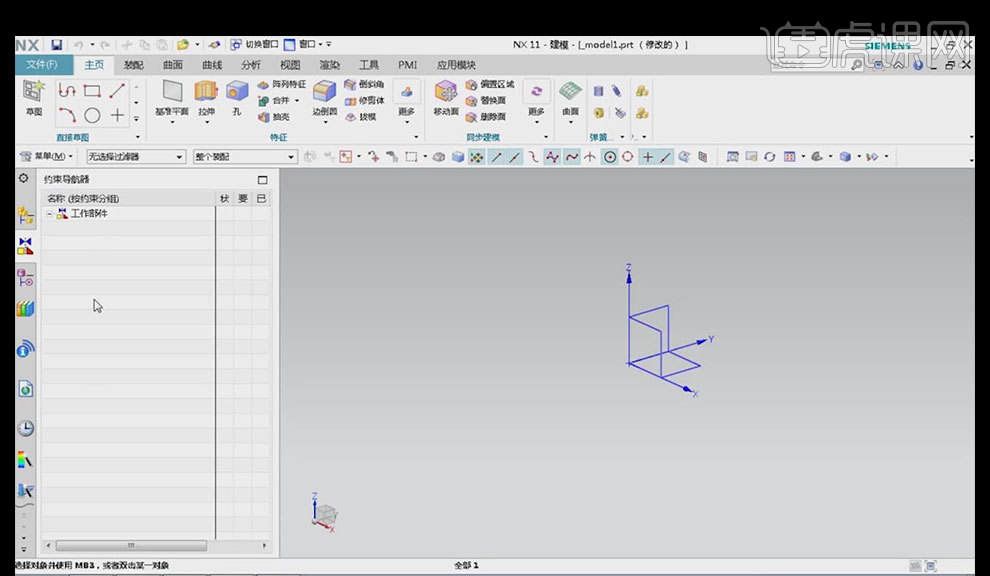
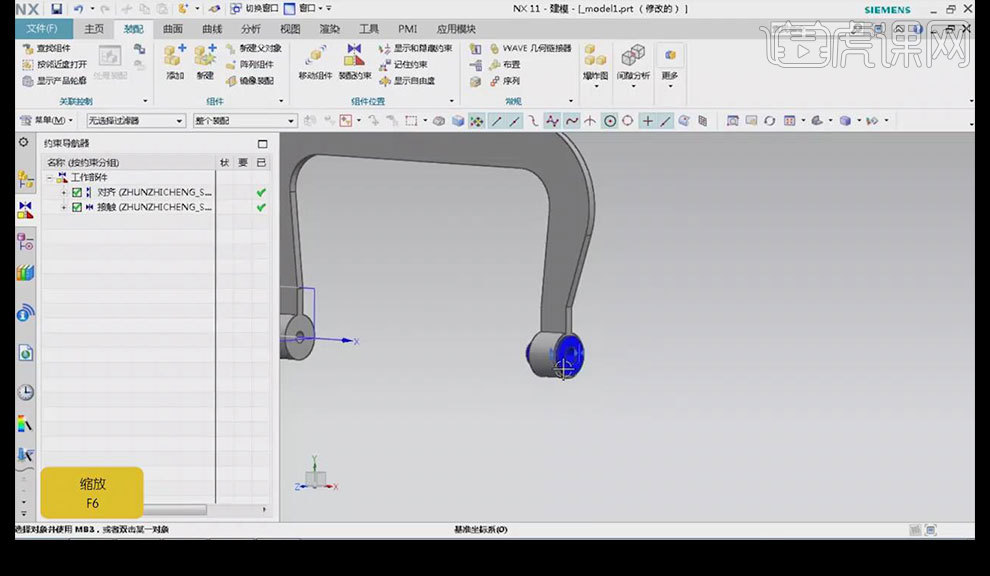
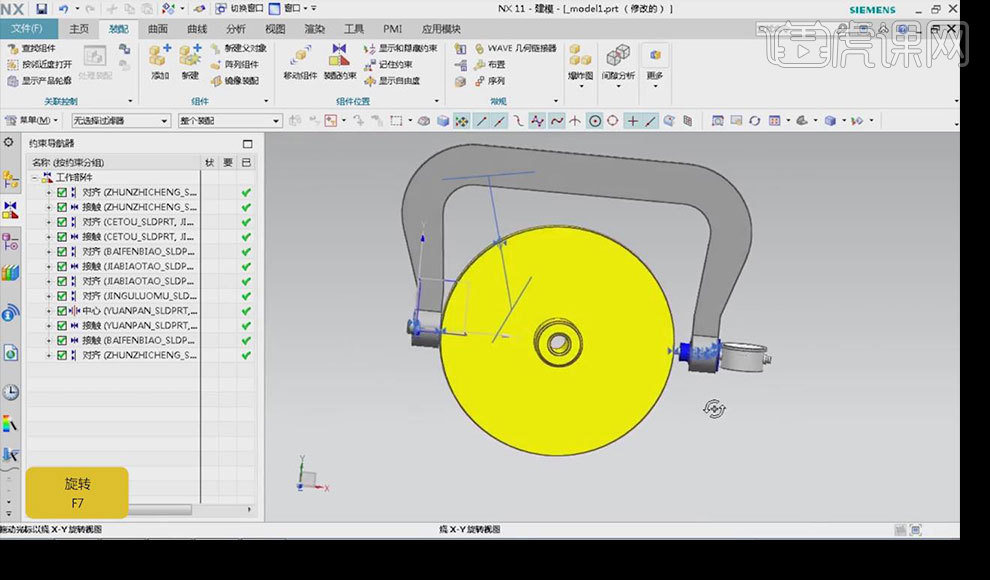
3.对效果图进行分析,打开UG,新建空白文档,选择【装配】选项卡,【装配导航器】的作用是描述部件名称,【约束导
航器】的作用是记录零部件与零部件之间的位置的约束信息。
4.点击【装配】选项卡,点击【添加】选择部件,将【定位】设置为【绝对原点】,点击【确定】。
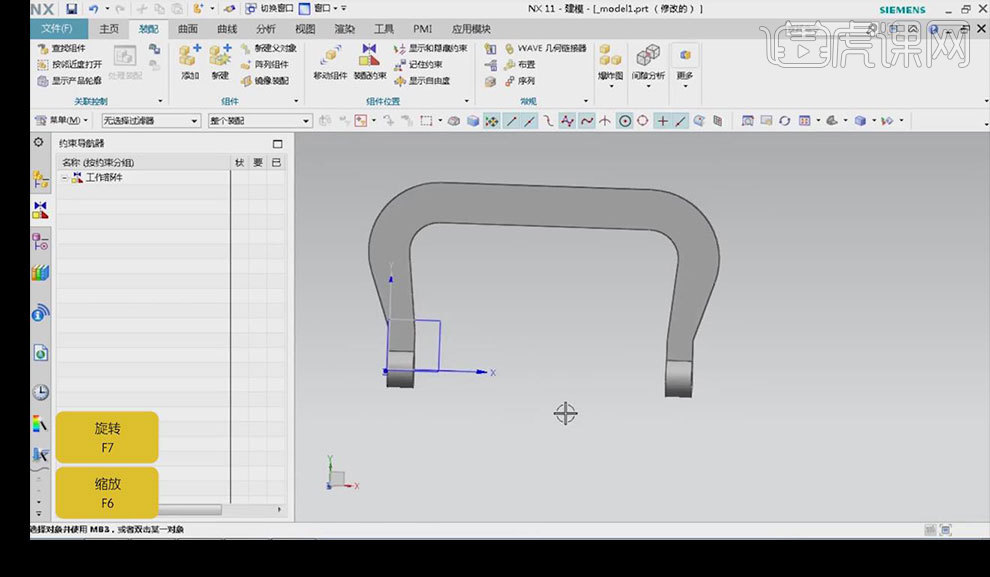
5.点击【添加】选择部件,将【定位】设置为【根据约束】,点击【确定】。点击【装配约束】,将【方位】先设置为
【自动判断中心/轴】,然后点击零部件将【方位】设置为【接触 】,具体如图所示。
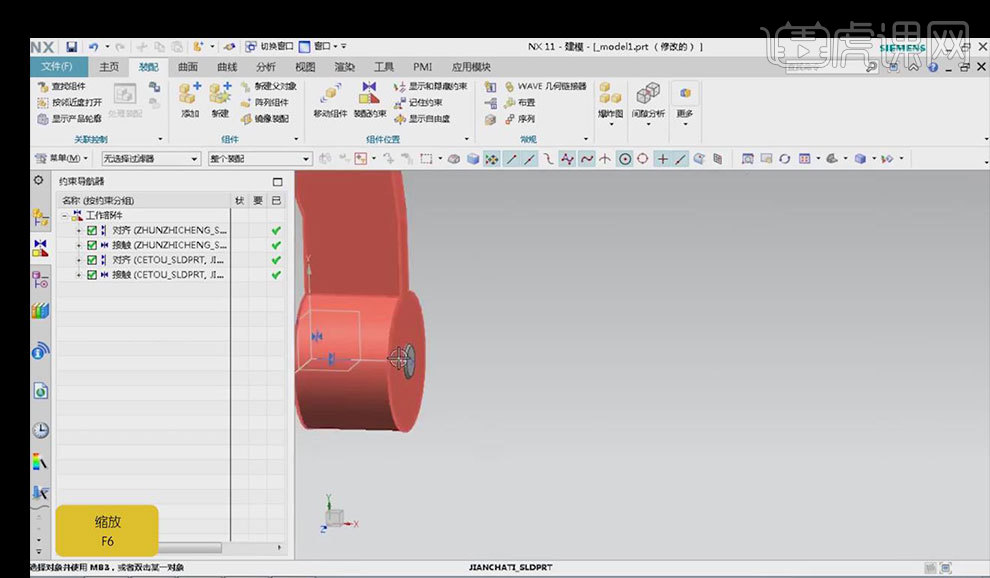
6.点击【添加】选择部件,点击【装配约束】,将【方位】先设置为【自动判断中心/轴】,将其调整至效果图所示。点击
【装配约束】,将【方位】设置为【接触 】,将其调整至效果图所示。
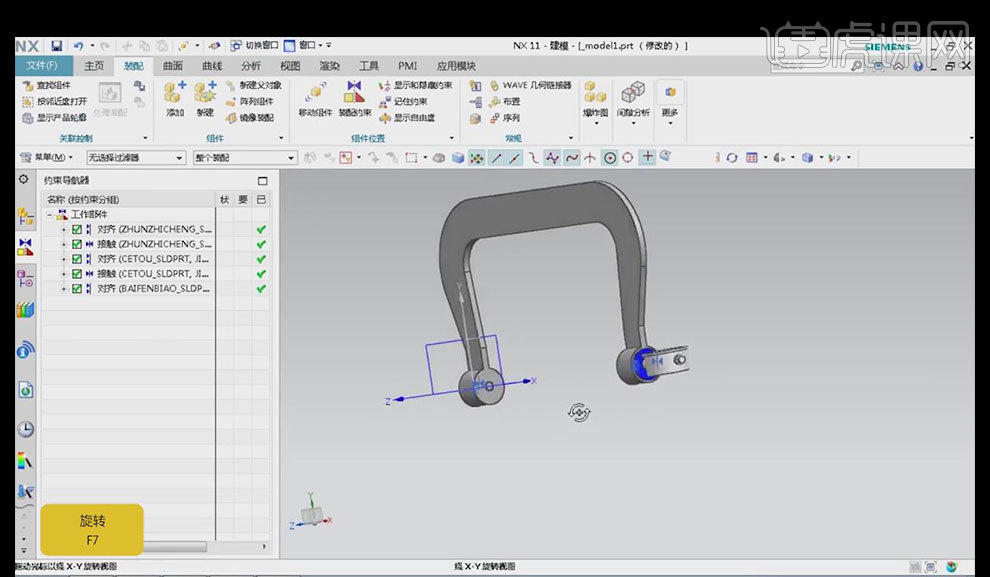
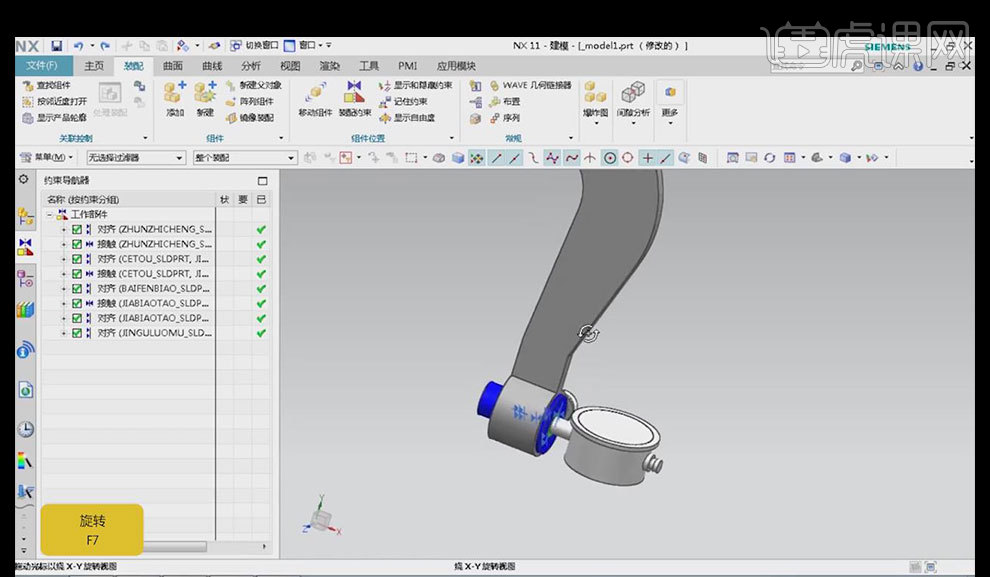
7.点击【添加】选择部件, 点击【装配约束】,将【方位】先设置为【自动判断中心/轴】,点击【确定】。点击【装配约
束】,点击【反向】,点击确定。点击【移动组件】,点击零部件调整方向,将【角度】设置为70,点击【确定】,具体
如图所示。
8.点击【添加】选择部件,点击【装配约束】,将【方位】设置为【自动判断中心/轴】,将其调整至效果图所示。点击【
装配约束】,将【方位】设置为【对齐】,将其调整至效果图所示。
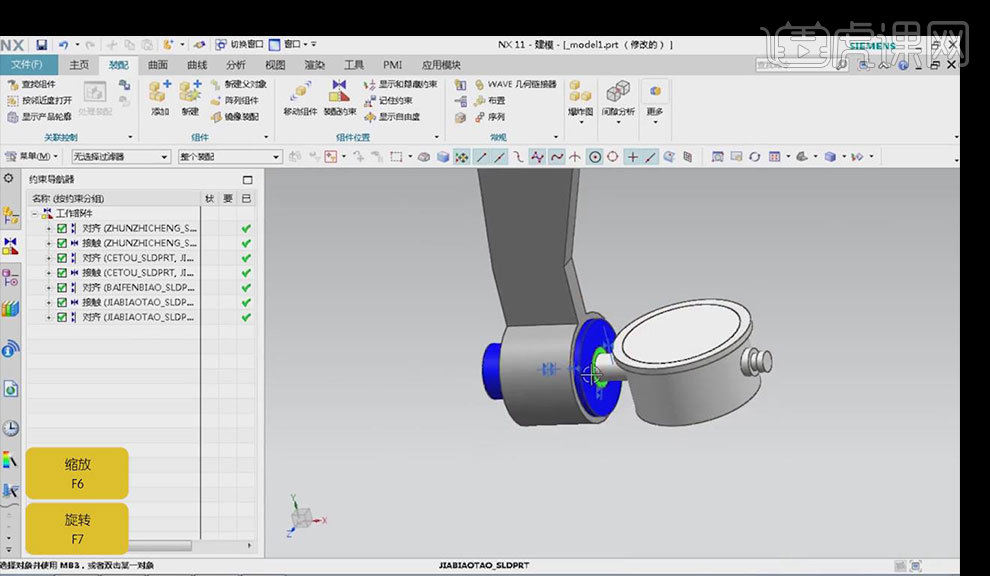
9.点击【添加】选择部件,点击【装配约束】,将【方位】设置为【自动判断中心/轴】,点击【确定】。点击【装配约束
】,点击【反向】,点击【确定】。点击零部件,按【Ctrl+B】隐藏,将其调整至效果图所示。
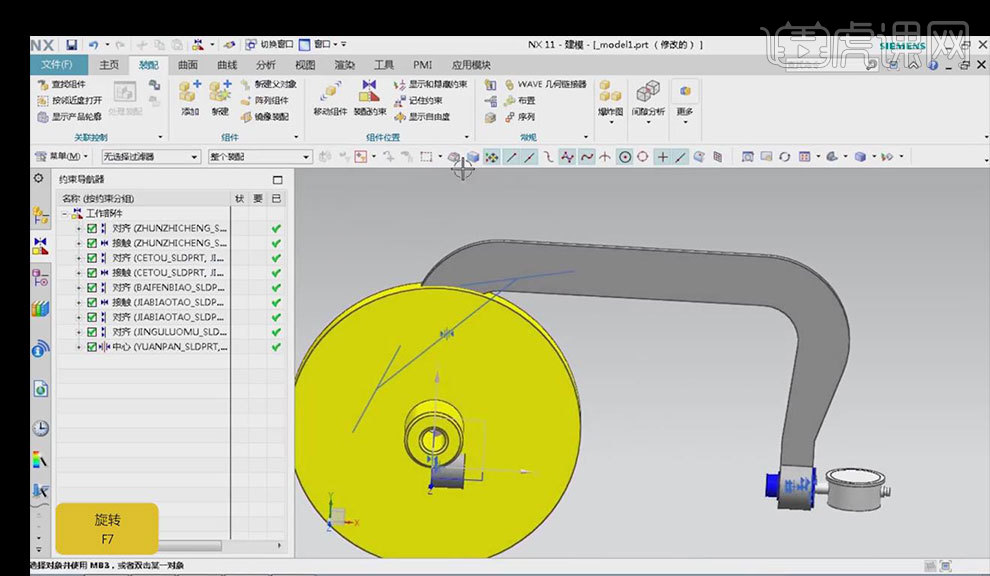
10.点击【添加】选择部件,点击【装配约束】,将【方位】设置为【自动判断中心/轴】,点击【确定】。点击【移动组
件】,设置【角度】为90,点击【确定】。点击【装配约束】,将【约束类型】设置为【居中】,点击【确定】,具体如
效果图所示。
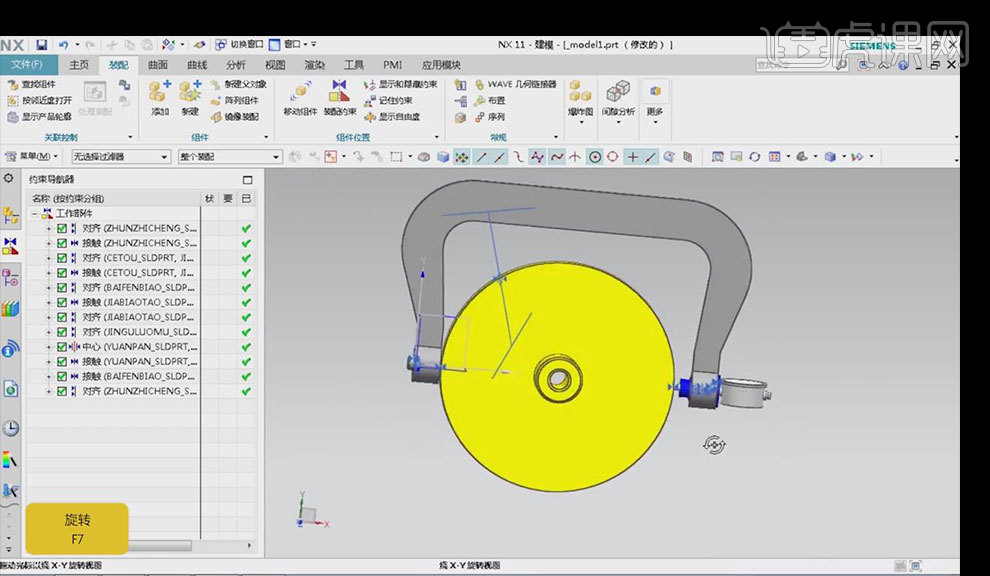
11.点击【移动组件】,设置【距离】为125,点击确定。点击【装配约束】,将【方位】设置为【接触】,点击【确定】
,调整至效果图所示。按【Ctrl+B】隐藏零部件,点击【装配约束】,将【方位】设置为【自动判断中心/轴】,点击【
确定】。点击【装配约束】,点击【反向】,点击【确定】,具体如图所示。
12.本课课后作业具体如图所示。
13.最终效果如图所示。





站内热门


- 扫码下载APP

- 官方微信

